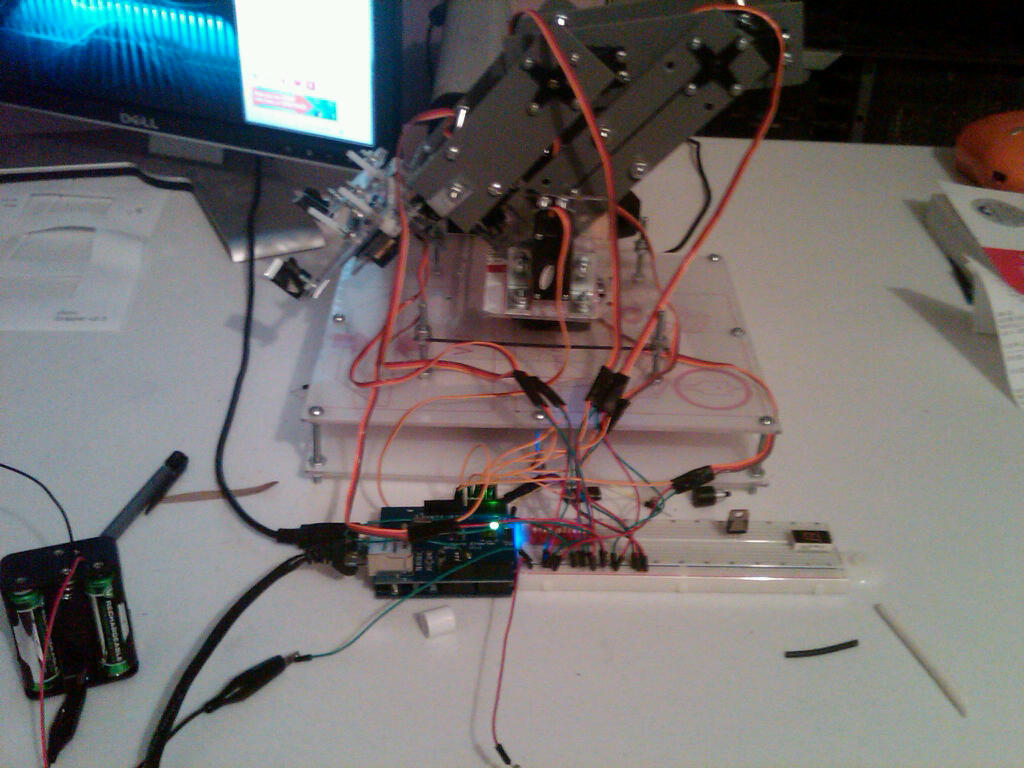
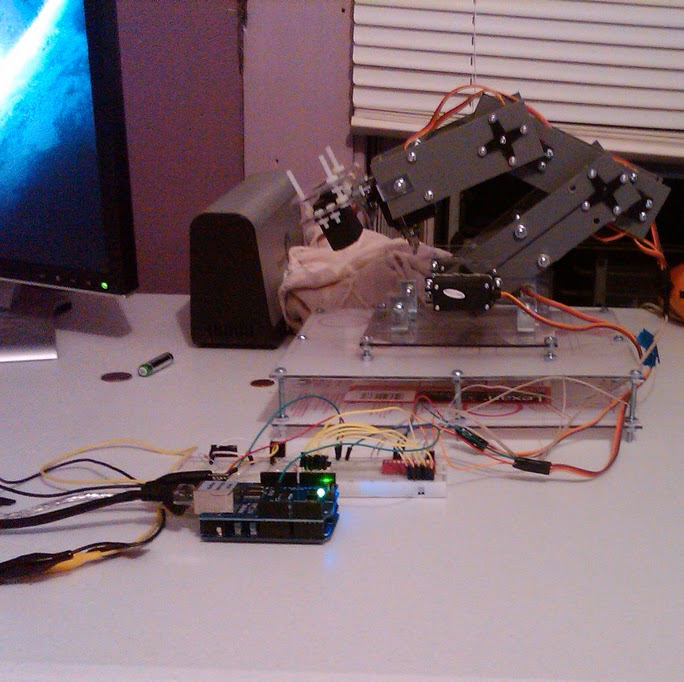
Five degrees of freedom robotic arm that can be control with Bluetooth or Wi-Fi. Arduino based controller with Ethernet and Bluetooth modules, written in C++.
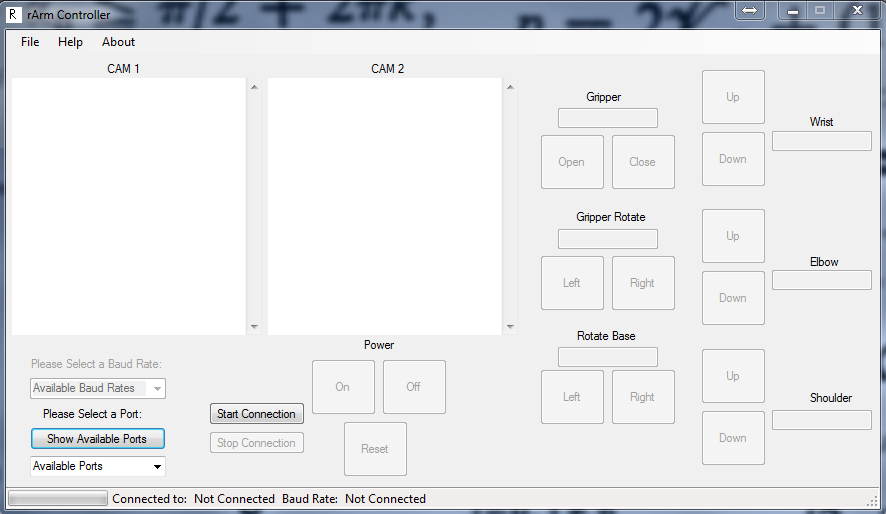
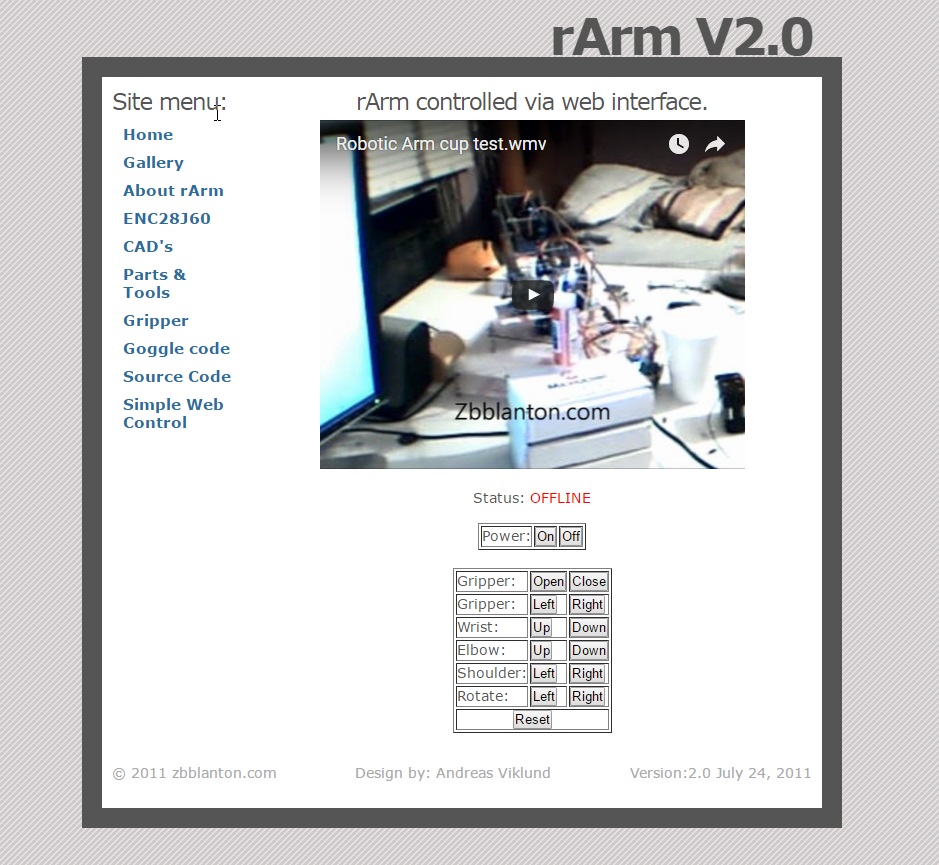
Meet rArm, my robotic arm. This has been an ongoing project since high school. It's a five degrees of freedom robotic arm that can be control with Bluetooth or Wi-Fi. The robot has been through several versions and currently at rArm 4.0. I've built a custom control application for windows that can control each servo and view up to 2 connected webcams. Version 2.0 was able to be controlled via a webpage as shown in the slides above.

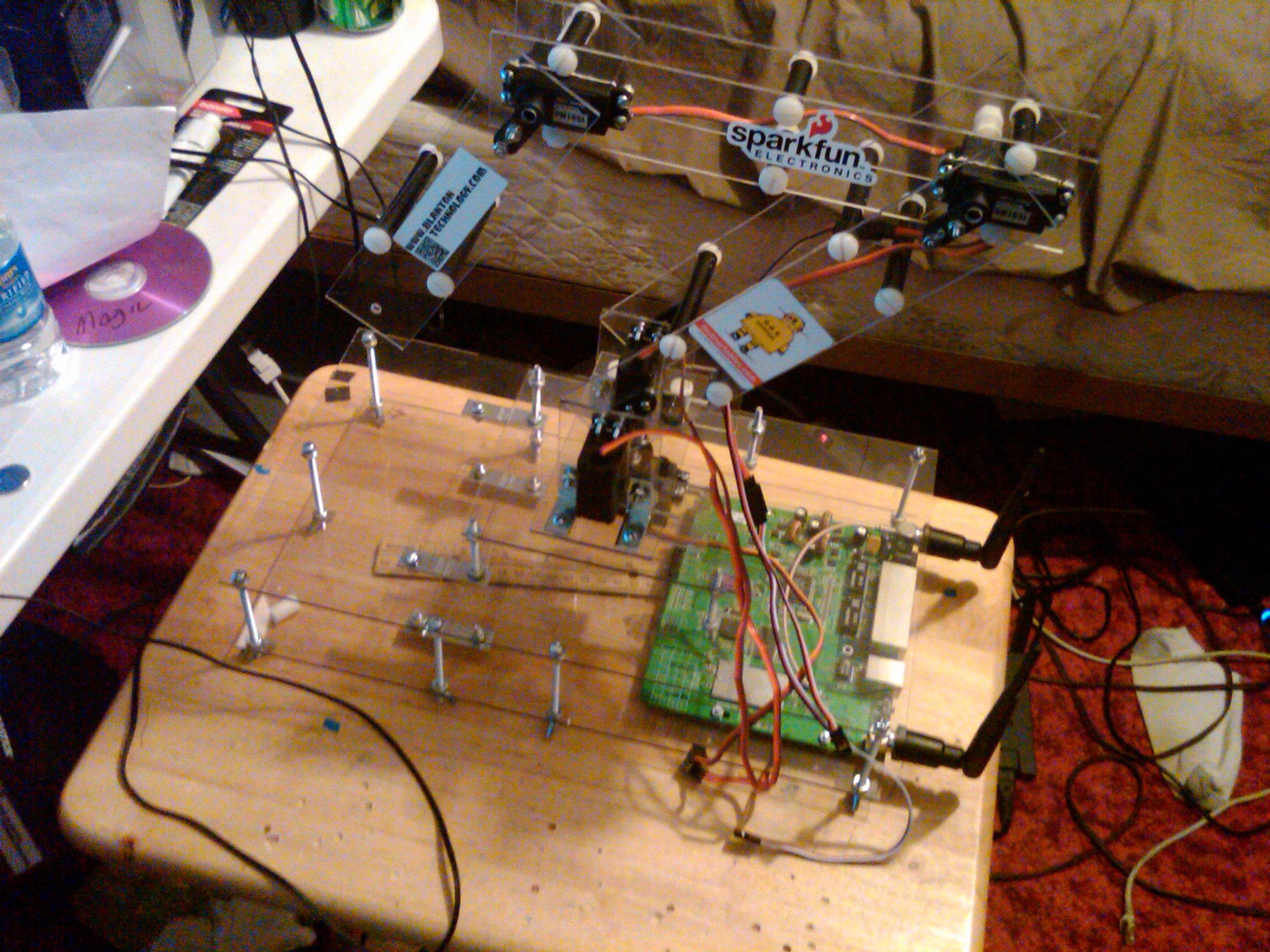
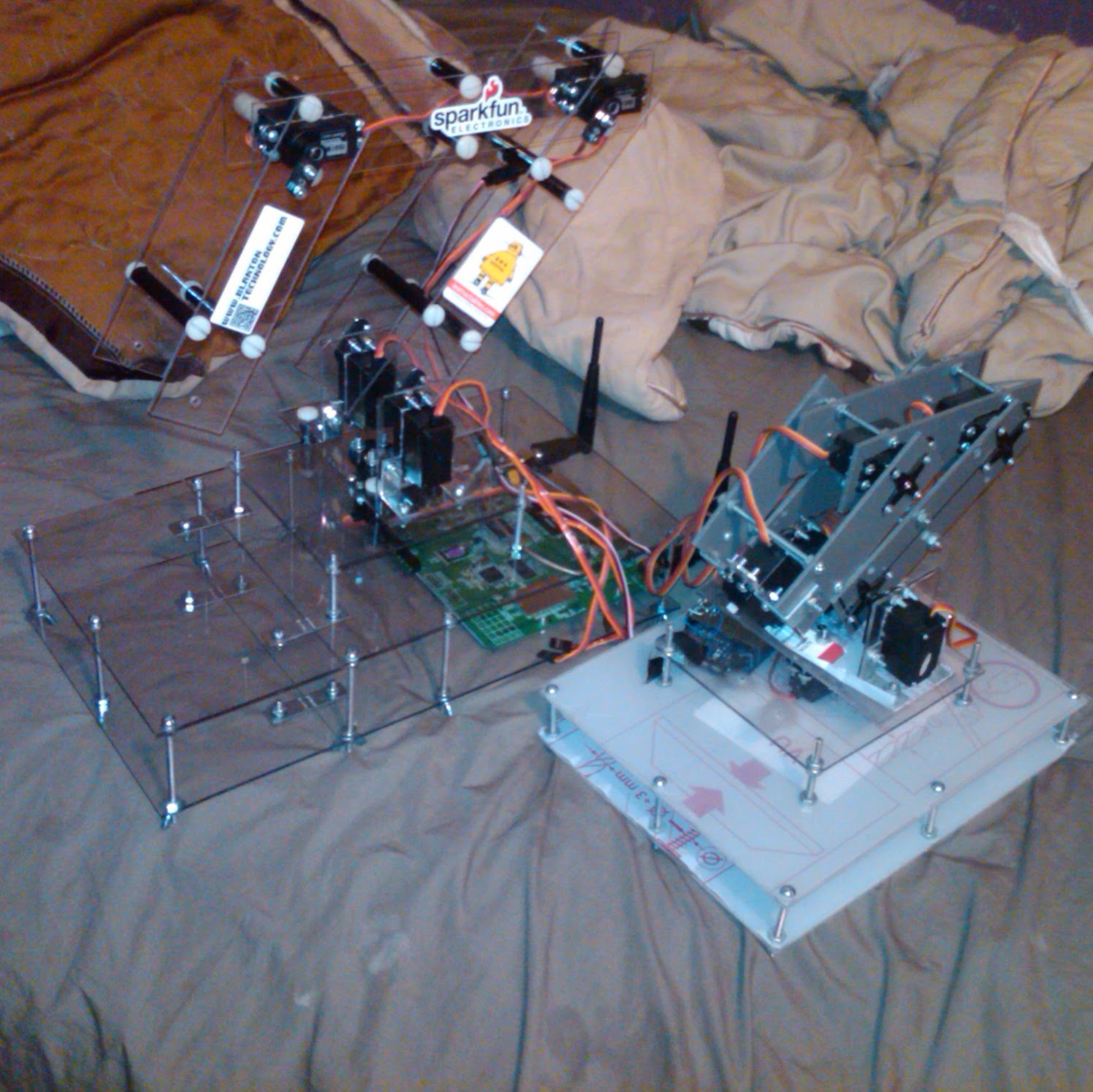
The old versions used Arduino with an ethernet shield. Version 4.0, that is still on going, it uses a PIC18F4520 with a TLC5940 LED Driver to control the servos. I have not decided how I want to control the new robot yet. The ESP8266 looks promising for controlling the robot with Wi-Fi. The picture is the newest version, this time I decided to simply print someone's design instead of making my own. I didn't want to focus all my time in the design.
Using a PIC18F4520 with a TLC5940 LED Driver to control the servos.
Old video of version 2.0 placing an object into a cup.